
講座概要
制御系設計は、一般的に、まず初めに制御対象(プラント)のモデリングを実施し、プラントの特性を調べます。次に、その制御対象を所望のとおりに制御するための制御系設計をします。
そして、その設計した制御器(コントローラ)の性能をシミュレーションで検証・確認してOKと判断したら、次はそのコントローラを実装をします。それは、新規開発のみならず差分開発であっても同じです。差分開発の新規部分、あるいは改良部分の制御ロジックを検討・設計し、シミュレーションで事前に検証・確認をしてから実装します。
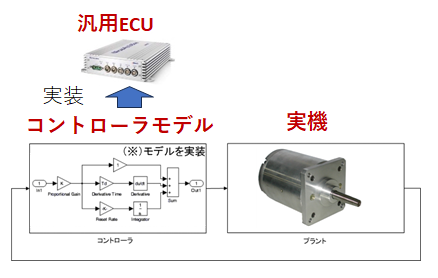
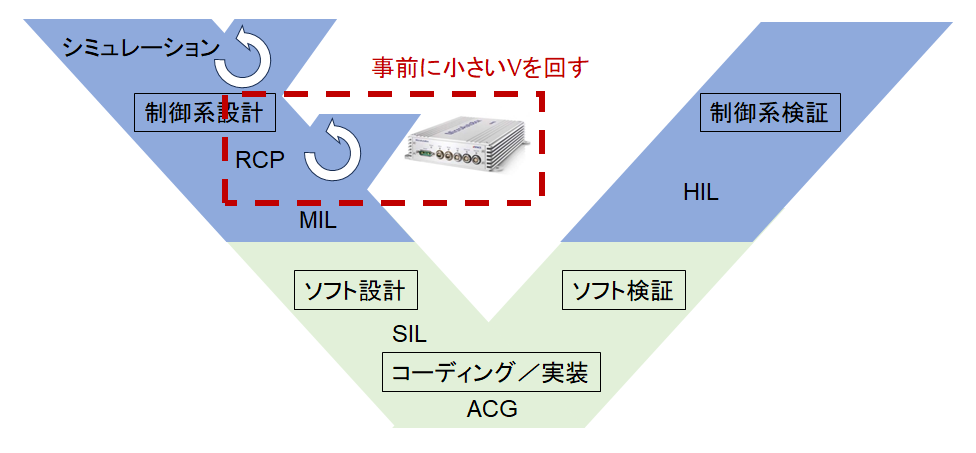
しかし、シミュレーションによる検証・確認だけではなく、実物の量産用マイコンに実装する量産ソフトウエアを開発する前に、マイコンではなく汎用ECUを使って実機(実物の制御対象)を実際に制御してみて、その性能を事前検証する開発プロセスを実施する場合があります。その開発プロセスをRCP(Rapid Control Prototyping)と言いますが、それにより、本来であればソフトウエアを開発・実装後の検証でしか確認できなかった事がこのPCPのプロセスで事前に確認ができるようになります。
また、コントローラの事前検証だけではなく、ゲインのチューニングといった適合も可能になります。RCPを実施しなかった場合、実装後の検証・適合でゲインなどのパラメータの変更のみで済めば良いですが、制御ロジックの変更(ソフトウエアの改修)が必要になった場合は手戻りが大きくなってしまいます。
RCPは、本来、ソフトウエアの実装後に実施していたこれらの検証や適合を設計フェーズで事前に実施することになりますので、所謂フロントローディングになります。
本講座では、「③コントローラモデル作成講座」で設計したコントローラを量産ECUに実装する前に、汎用ECUに実装して、制御系がシミュレーションとおりの性能が出ているか、つまり、制御仕様を満たしているか、検証・確認をします。制御仕様を満たしていないのであれば、プラントモデルと実物の制御対象の違いを考察するなどその原因が何かを検討し、再度、コントローラの設計をし直す内容になっています。
対象者
- シミュレーション開発、制御系設計などに携わる技術者の方
- モデルと実機の違いを理解、体験したい方
- 「③コントローラモデル作成講座」を受講済みの方
予備知識
- Simulinkの基礎操作ができる方
- 数学・物理の基礎知識(高校レベル)のある方
- dSPACE ControlDesk、ConfiurationDeskの基本的な操作ができる方
目次
| RCPとは | |
| はじめに | |
| 実験機材 | |
| 実験環境 | |
| コントローラの設計と実装 | |
| ①システム同定 | |
| ②DCモータの角度制御の制御系設計(P制御) | |
| RCPモデル作成(仕様モデルからPCPモデルへの改修) | |
| Step1 RCPモデルのコンフィギュレーション(設定) | |
| Step2 ハード(センサ、アクチュエータ)に応じた改修(IOモデル作成) | |
| 実装、および検証・適合 | |
| RCPモデルのダウンロード、実機の波形取得 | |
| 実機の波形とシミュレーションの波形の違いの考察 | |
| ゲインの適合 | |
| ③DCモータの角度制御の制御系設計(PD制御) | |
| RCPモデル作成(仕様モデルからPCPモデルへの改修) | |
| Step1 RCPモデルのコンフィギュレーション(設定) | |
| Step2 ハード(センサ、アクチュエータ)に応じた改修(IOモデル作成) | |
| 実装、および検証・適合 | |
| RCPモデルのダウンロード、実機の波形取得 | |
| 実機の波形とシミュレーションの波形の違いの考察 | |
| RCPモデルの改修(摩擦補償)と検証 | |
| ゲインの適合(ファインチューニング) | |
| まとめ |
日数
1日間(1日7時間)
受講料
オンサイト講座 1日:750,000円(税抜)
- 実験用機材(制御対象モータ、マイコンボード、統合開発環境、MicroAutoBox)のレンタル料込みの価格です。
- 5名以上の場合は、受講料が変わってきますのでお問合せください。
- お客様のご要望に応じて、内容をカスタムすることも可能ですのでご相談ください。
- 遠方の場合の出張費など別途費用が発生する場合もございます。また、予告なく変更・改定になる場合がございますこと予めご了承ください。