
講座概要
本講座では、運動方程式などの支配方程式が与えられた時、その方程式をSimulinkで解くこと(シミュレーション)を目的としたSimulinkモデルを作成する方法を演習・実習の繰り返しによって習得していきます。
この講座の最終目標として、標準MBD教育コースで実際に制御するDCモータのモデルをつくることを目指して、基礎から学習していきます。DCモータは、機械系と電気系のいわゆるマルチドメイン系の代表的な制御対象です。本講座の中で分野間にまたがるアナロジー(類似性)についても説明しますので、基礎的・本質的なところから理解が深まる内容になっています。
支配方程式の導出は本講座では実施しませんが、与えられた方程式の意味などの解説は、演習・実習に取り組む前にします。それによって、実務において初見の方程式を扱わなければならない際に、その式の意味を理解する練習にもなり、また、支配方程式の導出の方法についても、その勘所が得られるようになると考えています。
対象者
- 物理シミュレーションをSimulinkで出来るようになりたい方
- プラントモデルの作成方法を習得し、実務に活かしたい技術者の方
- シミュレーション開発、制御系設計、HIL開発などに携わる技術者の方
予備知識
- Simulinkの基礎操作ができる方
- 数学・物理の基礎知識(高校レベル)のある方
目次
| 物理シミュレーションの方法(モデルの作り方) | |
| 例題1 1自由度の機械系の運動方程式(並進運動) | |
| 実習2 1自由度の機械系の運動方程式(回転運動) | |
| 例題3 自動車の簡単な加速シミュレーション | |
| 実習4 RLC回路の支配方程式(電気系のシミュレーション) | |
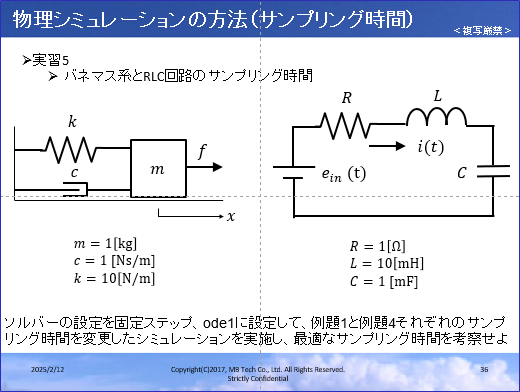
| 実習5 バネマス系とRLC回路のサンプリング時間 | |
| 例題6 1次遅れ系 | |
| 実習7 船の操舵シミュレーション | |
| 実習8 2自由度の機械系の運動方程式(並進運動) | |
| 実習9 自動車のサスペンションの簡単なシミュレーション | |
| 実習10 2自由度の機械系の運動方程式(回転運動) | |
| 実習11 2自由度の機械系の運動方程式(Stiffな2慣性システム) | |
| 実習12 2自由度の機械系の運動方程式(さらにStiffな2慣性システム) | |
| 実習13 Maxwellモデル(2要素) | |
| 実習14 Maxwellモデル(3要素) | |
| 実習15 Maxwellモデル(4要素) | |
| 代数ループ | |
| 実習16 代数ループとは | |
| 実習17 代数ループの回避 | |
| 例題18 擬似代数ループとは | |
| プラントモデルの種類 | |
| 物理シミュレーションの方法(実験モデル) | |
| 実習19 実験式ベースのモデル | |
| 実習20 Mapベースのモデル(簡易エンジンモデル) | |
| 最後の問題 | |
| 実習21 電気系と機械系のマルチドメインシステム(DCモータのプラントモデル) | |
| まとめ | |
| Appendix A 高次遅れ | |
| Appendix B Wall-wetting model | |
| Appendix C Maxwell model | |
| Appendix D 非最小位相系 |
日数
3日間(1日7時間)
受講料
オンサイト講座 1日:500,000円(税抜)
- 15名を越える場合は、受講料が変わってきますのでお問合せください。
- お客様のご要望に応じて、内容をカスタムすることも可能ですのでご相談ください。
- 遠方の場合の出張費など別途費用が発生する場合もございます。また、予告なく変更・改定になる場合がございますこと予めご了承ください。