
講座概要
.png)
本講座は、上流工程であるソフトウエア開発のプロセスで作製したソフトウエア(これはプログラマがハンドコードで作成した場合もあれば、ソフトウエアのモデルから自動コード生成(ACG)する場合もあります)を実際の量産マイコンに実装し、実物の制御対象であるモータを実際に制御して、その性能を確認、必要であれば適合をする内容です。
本講座では、「⑤実装モデル作成講座」で作製したACGコードを実際にマイコンに実装します。実物の制御対象であるモータを扱いますので、まず最初に、本講座で使う実験キットの実物のモータの特性を調べる同定実験を実施し、そして、制御対象モデル(プラントモデル)を構築します。そのプラントモデルに対して、「③コントローラモデル作成講座」および「⑤実装モデル作成講座」で実施した内容に沿って、再度、制御系設計およびソフトウエア開発を実施して、実際にマイコンに実装するソフトウエアを作成します。
実際に制御をしてみると、シミュレーションの波形とは異なる点が見られます。実機とモデルの違いは何なのか?を考察し、その違いをモデルに反映することによって実機の波形とシミュレーションの波形が一致するようなモデルを作成することが体験できます。モデルベース開発においては、このようなコリレーション(相関性)を取ることがとても重要になってくるのですが、本講座ではまさにそれが体験できる講座になっています。
対象者
- ソフトウエアの実装について理解したい方
- 実機とモデルのコリレーションについて理解したい方
- ACGによるソフトウエアの開発・実装、検証などに携わる技術者の方
- 「③コントローラモデル作成講座」が受講済みの方
- 「⑤実装モデル作成講座」が受講済みの方
予備知識
- Simulinkの基礎操作ができる方
- 必須ではありませんが、組込ソフトウエア開発の経験がある方が望ましい
- 必須ではありませんが、大学数学の初級(z変換等)の知識がある方が望ましい
- 必須ではありませんが、組込ソフトの開発の経験・知識がある方が望ましい
目次
| はじめに | |
| 実験機材 | |
| 実験環境 | |
| PFのソフトウエア構成 | |
| APL(量産コード)とPFの結合 | |
| コントローラの設計と実装 | |
| ①システム同定 | |
| ②DCモータの角度制御の制御系設計(P制御) | |
| 実装モデル作成(仕様モデルから実装モデルへの改修) | |
| Step1 ハード(センサ、アクチュエータ)に応じた改修(IOモデル作成) | |
| Step2 連続時間モデルの離散化 | |
| Step3 整数演算化(固定小数点化) | |
| Step4 ACG(自動コード生成) | |
| Step5 MIL-SIL検証(B2Bテスト:実装モデルとACGコードの同一性検証) | |
| 実装、および検証・適合 | |
| APL(ACGコード)の実装、実機の波形取得 | |
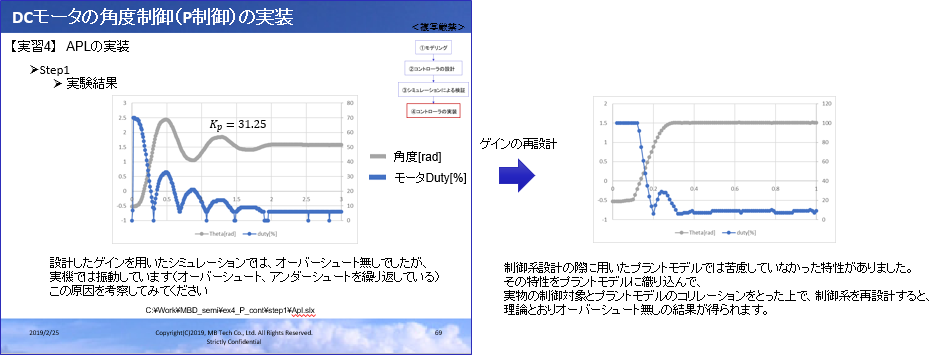
| 実機の波形とシミュレーションの波形の違いの考察 | |
| ゲインの適合 | |
| APLの改修(摩擦補償)と検証 | |
| ③DCモータの角度制御の制御系設計(PD制御) | |
| 実装モデル作成(仕様モデルから実装モデルへの改修) | |
| Step1 ハード(センサ、アクチュエータ)に応じた改修(IOモデル作成) | |
| Step2 連続時間モデルの離散化 | |
| Step3 整数演算化(固定小数点化) | |
| Step4 ACG(自動コード生成) | |
| Step5 MIL-SIL検証(B2Bテスト:実装モデルとACGコードの同一性検証) | |
| 実装、および検証・適合 | |
| APL(ACGコード)の実装、実機の波形取得 | |
| 実機の波形とシミュレーションの波形の違いの考察 | |
| APLの改修(摩擦補償)と検証 | |
| ゲインの適合(ファインチューニング) | |
| まとめ |
日数
3日間(1日7時間)
受講料
オンサイト講座 1日:750,000円(税抜)
- 教育機材(制御対象モータ、マイコンボード、統合開発環境)のレンタル料込みの価格です。
- 10名を越える場合は、受講料が変わってきますのでお問合せください。
- お客様のご要望に応じて、内容をカスタムすることも可能ですのでご相談ください。
- 遠方の場合の出張費など別途費用が発生する場合もございます。また、予告なく変更・改定になる場合がございますこと予めご了承ください。