
講座概要
本講座は、上流工程である制御系設計のプロセスで構築した制御器(コントローラ、これはRCPのプロセスを経てその性能が検証済であることもあれば、そうでない場合もあります)を実際の量産マイコンに実装する為のソフトウエア(Cコード)を開発・構築する内容の講座です。
自動車のようなコストに対する要求が厳しい製品においては、浮動小数点演算ではなく固定小数点演算、あるいは整数演算をすることが未だにおこなわれています。
上流工程から与えられる制御器の仕様モデル(コントローラモデル)の形式や粒度は、組織、あるいはプロジェクトによって変わってきますので様々ですが、本講座では、浮動小数点演算(Simulinkではdouble)の形式で表現された連続時間モデル(「③コントローラモデル作成講座」で作成したもの)が与えられたとして、そのモデルを数値的な離散化、時間的な離散化を施して離散時間モデルを作成し、それらの連続時間モデルと離散時間モデルの差異をシミュレーションにより確認して、その影響を把握・考察します。
そして、その作成したソフトウエアのモデル(離散時間モデル)から自動コード生成(ACG)してCソースコードを生成します。これはオートコーダー(自動コード生成ツール)の性能によるところが大きいですが、ツールの使い方に注意することなどがあります。ACGの後、ソフトウエアのモデルとCソースコードの一致性をB2Bテスト(MIL-SIL検証)によって確認します。
対象者
- コントローラモデルの離散化について理解したい方
- マイコンに実装する為のコントローラモデル(実装モデル)の作成方法、作成プロセスを習得し、実務に活かしたい技術者の方
- ACGによるソフトウエアの開発などに携わる技術者の方
- 「③コントローラモデル作成講座」が受講済みであることが望ましい
予備知識
- Simulinkの基礎操作ができる方
- 数学・物理の基礎知識(高校レベル)のある方
- 必須ではありませんが、大学数学の初級(z変換等)の知識がある方が望ましい
- 必須ではありませんが、組込ソフトの開発の経験・知識がある方が望ましい
目次
| コントローラの実装 | |
| コントローラの実装のプロセス | |
| DCモータの角度制御(P制御)の実装 | |
| Step0 仕様モデル(浮動小数点) | |
| Step1 ハード(センサ、アクチュエータ)に応じた改修 | |
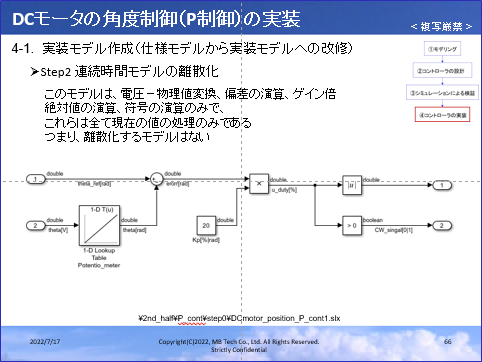
| Step2 連続時間モデルの離散化 | |
| Step3 整数演算化(固定小数点化) | |
| Step4 ACG | |
| Step5 MIL-SIL検証 | |
| DCモータの角度制御(PD制御)の実装 | |
| Step0 仕様モデル(浮動小数点) | |
| Step1 ハード(センサ、アクチュエータ)に応じた改修 | |
| Step2 連続時間モデルの離散化 | |
| Step3 オートスケールによる整数演算化(固定小数点化) | |
| Step4 ACG | |
| Step5 MIL-SIL検証 | |
| ゲイン切替制御の実装 |
日数
3日間(1日7時間)
受講料
オンサイト講座 1日:500,000円(税抜)
- 15名を越える場合は、受講料が変わってきますのでお問合せください。
- お客様のご要望に応じて、内容をカスタムすることも可能ですのでご相談ください。
- 遠方の場合の出張費など別途費用が発生する場合もございます。また、予告なく変更・改定になる場合がございますこと予めご了承ください。