
概要
当社の保有する標準的なMBD教育コースとして、モデリング、制御系設計、自動コード生成・実装、実験、検証・適合といった一連の開発をV字プロセスに沿って学習する体験型実習ベースの講座郡を用意しております。
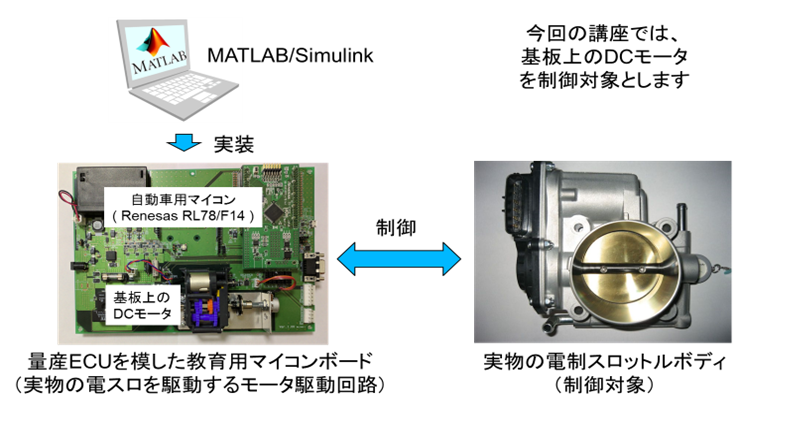
制御対象を実物のモータとし、モータの速度制御、位置決め制御を開発する内容になっています。
また、講座の中で作成するソフトウエアは、実際に自動車で使われているマイコンに実装しますので、実際の開発に近い内容となっています。そして、実際の開発プロセスと同様の手順で進めていくことから、この一連の講座を受講することでモデルベース開発の実務にすぐに活かせる内容になっています。
特徴
- モデルベース開発未経験者向けとして、基礎から学ぶことができる
- MATLAB/Simulinkの使用経験のない方が対象の場合、ツールの基本操作の習得から学べる
- MBDのデファクトツールであるMATLAB/Simulinkを使った実践的な実習ベースの内容
- 実際の自動車用ECUに用いられているマイコンを使った実践的な実習ベースの内容
- モデル(シミュレーション)と実機の違いを実験をとおして体験し、モデルの改修へフィードバックする内容
(モデルのコリレーションをとると理論とおりの結果が得られることが体験できます)
対象者
- MATLAB/Simulinkの使用経験のない組込み開発エンジニア
- MATLAB/Simulinkの使用経験のない制御系開発エンジニア
必要な基礎知識
組込み開発(マイコンのソフトウエア開発など)の知識・経験のある方が望ましい
目標レベル
自動車業界の基本的なMBD開発の流れを理解し、MBD開発の業務に取り組めるレベル(上司や先輩の指示の元、業務の遂行ができるレベル)
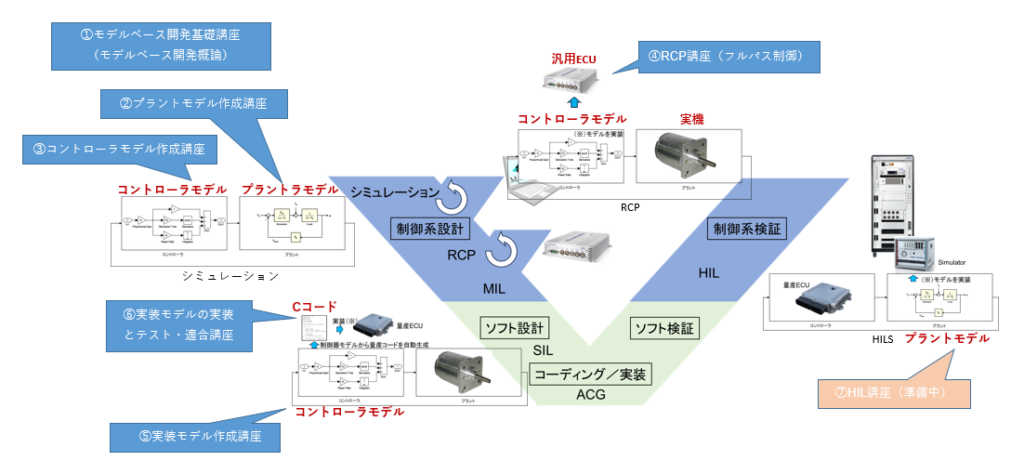
各講座の体系
各講座の概要
| 講座名 | 講座概要 |
|---|---|
| ①モデルベース開発基礎講座 (モデルベース開発概論) | 本講座では、一般的にモデルベース開発において成功したと言われている4つの分野について、事例を交えながら紹介することによって、モデルベース開発とはどのような開発手法なのか?といったことを受講者の皆さまにイメージしていただくことを目的としてお話させていただきます。 |
| ②プラントモデル作成講座 | 本講座では、運動方程式などの支配方程式が与えられた時、その方程式をSimulinkで解くこと(シミュレーション)を目的としたSimulinkモデルを作成する内容の演習・実習の繰り返しによって、プラントモデル作成の方法を習得していきます。 |
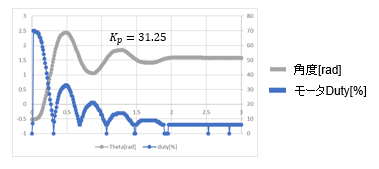
| ③コントローラモデル作成講座 | 本講座では、DCモータの速度制御、位置決め制御の問題に対して、制御系を設計し、Simulinkモデルを作成してシミュレーションして、その制御器(コントローラ)の性能を確認する内容です。 制御対象(プラント)であるDCモータは、「⑥実装モデルの実装とテスト・適合講座」の中の実験で使用する実物のモータを対象としています。 |
| ④RCP講座(フルパス制御) | 本講座では、「③コントローラモデル作成講座」で設計したコントローラを量産ECUに実装する前に、汎用ECUに実装して、制御系がシミュレーションとおりの性能が出ているか、つまり、制御仕様を満たしているか、ソフトウエアを開発する前に実機(モータ)を実際に制御してみて検証・確認します。 制御仕様を満たしていないのであれば、プラントモデルと実物の制御対象の違いを考察するなどその原因が何かを検討し、再度、コントローラの設計をし直す内容になっています。 |
| ⑤実装モデル作成講座 | 本講座では、上流工程である制御系設計のプロセスで構築した制御器(コントローラ:これはRCPのプロセスを経てその性能が検証済であることもあれば、そうでない場合もあります)を実物の量産マイコンに実装する為のソフトウエア(量産コード)を開発・構築する講座です。 |
| ⑥実装モデルの実装とテスト・適合講座 | 本講座では、上流工程であるソフトウエア開発のプロセスで作製した量産コード(これはプログラマがハンドコードで作成した場合もあれば、ソフトウエアのモデルから自動生成したACGコードの場合もあります)を実物の量産マイコンに実装し、実物の制御対象であるモータを実際に制御し、その性能を確認します。そして、必要であれば適合をする内容になっています。 |